中国电力电网—电塔爬壁安全绳挂接机器人
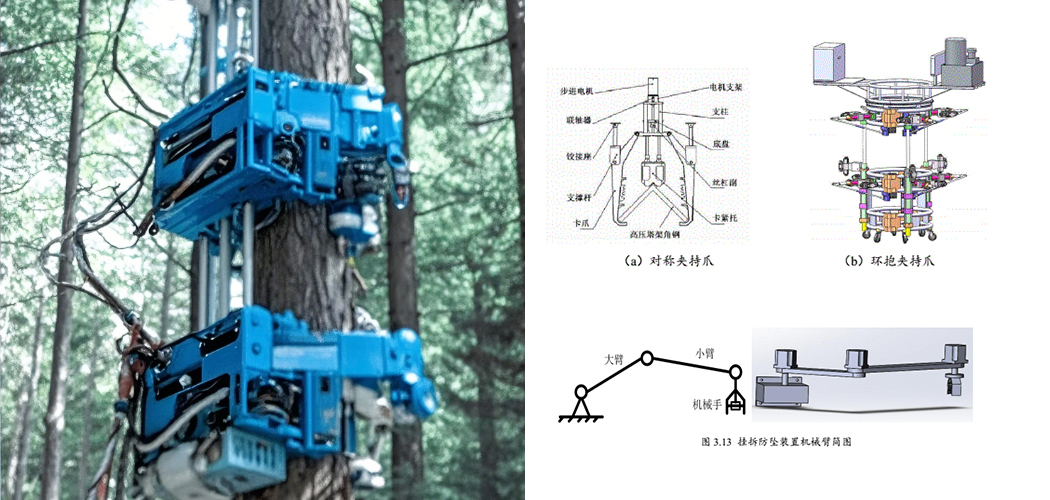
在我国电力系统中,输电铁塔的巡检与维修大多是由人工来完成,但是人工攀爬铁塔进行检修存在一定的危险性。通常第一位检修人员要带着安全绳攀爬铁塔,然后进行安全绳的挂接,为后续攀爬人员提供安全保障。检修完毕后,最后一位工作人员还需带着安全绳下来,但是第一位和最后一位工作人员在攀爬与返回的过程是没有任何保护措施的,难免会出现人员坠落及其他危险性事件发生。针对这些问题,设计出一种可自主攀爬电塔并完成安全防坠装置挂拆工作的爬壁机器人就可以完美解决。
电塔爬壁安全绳挂接机器人包括上部夹持手、下部夹持手、行进机构和机械臂。夹持手由夹持手爪、外展机构和顶出机构组成,左右两侧夹持手爪和外展机构根据菱形对中原理设计。这种对称式的结构设计不仅可以使夹持手爪与角钢稳定接触,而且对称设置的外展机构还具有躲避角钢障碍的功能。顶出机构的作用是保证机器人攀爬过程中机身始终与主材角钢平行,避免因机身倾斜影响机器人的攀爬与越障精度。行进机构的伸缩可以实现机器人沿主材角钢进行移动,直线式的行进机构可以大大提高机器人的移动效率。当机器人攀爬至设定工作位置,通过控制机械臂的各关节运动完成防坠装置的挂接和拆除任务。
杭州老板介绍说:“自从引进电塔爬壁安全绳挂接机器人,人工成本降低了,分拣效率更高了,查询溯源,他们也实现自动化一体了”。